

 hacking to the gate
hacking to the gate
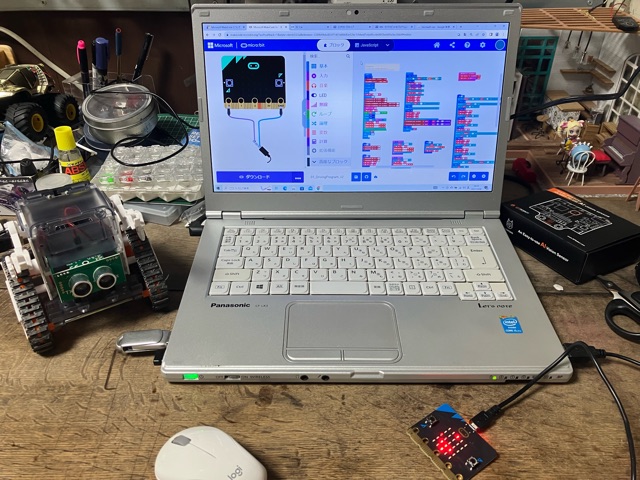

(マイコンロボット工作セットには2種類のプログラムが用意されている。) ・キットの組み立ては楽勝だったようね。( ̄∇ ̄) ミニ四駆触ってりゃどうって事ないな。気をつけないといけないのはモーターの極性ぐらいだ。プラスマイナスが少し分かりづらい。まぁ、いきなりバックした時は焦った(笑) ・次はコーディングについてよ。micro:bitで特徴的なのはMicrosoftのMakeCodeを使ってコーディングする事で、コンピュータ言語が分からなくても誰でもコーディングが可能...。 って言うんだけどなぁ、いきなりコーディングとか言われても訳分かんないよー。 ・(*´-`)ワタシが哲学とか言われても訳分かんないのと一緒でしょ?ホラ、辛抱強く頑張って! はいはーい...。でさ、このロボット見て思うんだが、『ニーア・オートマタ』ってゲームに出てくるロボットに動きが似ていて、その場をバタバタ旋回するポンコツロボットにしか見えないんだが...。 ・コードを弄って調教すれば良いじゃない(*´-`) お、おう。そうか。えーっと。 ・(*´-`) ずっと 呼び出しULTRASONIC1 もし 0<RangeL かつ RangeL<150なら 呼び出しMOVE 変数speedを1023にする もし ランダムに真か偽に決めるなら 変数 turn を511にする でなければ - 変数 turn を-511にする + 変数wait を1500にする ・この辺のブロックのパラメータを少しずつ変化させてみて。大切なのは1つずつ、少しずつ変える事よ。いきなり全部変えたらどこでつまずいたか訳分からなくなるから。 まるでミニ四駆のセッティングと同じだな。了解でーす。 「赤外線センサーとの距離が150mm以下になったらターン」だし、speedはモーター出力の事だな。何で最大が1023か分からないけれど。とりあえずスピードを落としてみるよ...。アレ、動かなくなった。 ・(*´-`)ホラ、落とし過ぎでしょ?500じゃモーターがまともに回らないわ。他のブロックを見てみるとスロースピードは895にセッティングされてるでしょ?因みに旋回保持時間1500はミリ秒だから1.5秒よ? お、おう。 ...。んーまぁまぁの動きになったかな。 ・でしょ?司令官の言う通り動くんだから( ̄∀ ̄)
2023/10/08 22:14:13






