






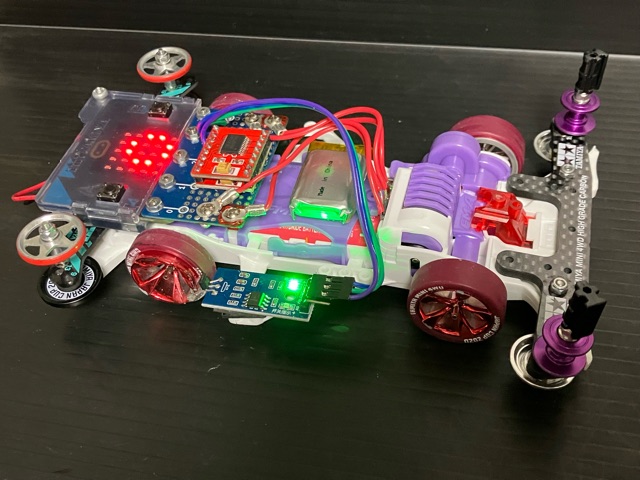
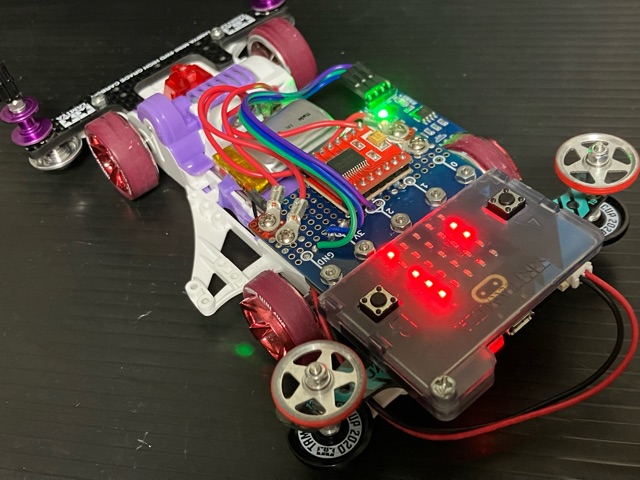









BBC miclo:bit (マイコンロボット工作キットに入っているアレ)を搭載したサイバーミニ四駆2号機ロールアウト。 モーター制御をマグネットリレーまたはFETスイッチから東芝製デュアルモータードライバーチップ(TB6612FNG×2基)に変更し、ショートブレーキ、逆転ブレーキにも対応した。モーターへの電力は1チャンネル当たり定格1.2A、ピーク3.2Aのところ、合計4チャンネルをすべて並列に繋いで使用。 ターミナルの取り回しは片軸の方がやりやすいため、シャーシはFM-Aに変更。マイクロビットはリヤステーに留めるようにして全体的に低く、まとまりが出た印象。
2023/12/02 22:29:19





















こういうのをシロウトでも作れるような環境になったのが嬉しいですね。ただ初心者とコアな研究者のあいだがなかなか埋まってこないんで、そこは頑張りまーす。というカンジです。
見てても楽しそうです。
確かに今、まさに誤差が増えて(多めにカウントし過ぎて)困っているっていう。コード含めて見直しが必要ですわ。流石!
ホイールセンサーはフロントに当てた方が良さそうですね!
